
组织单位:教务处、校团委、学工部
承办单位:机械工程学院力创团队
协办单位:机械工程学院学生会、机械工程学院分团委
技术支持:机械工程学院仪器科学与质量工程系
2019年10月
为营造我校大学生的学术科技氛围,促进大学生群众性科技文化活动的普及和深化,提高青年学子实践创新能力的培养,展现我校科技创新水平,结合全国“质量月”活动开展,特此举办2019年湖北工业大学“质量杯”机器人创新大赛。比赛要求参赛队员走出课堂,组成战队,研发制作机器人参与团队竞技,通过大赛获得宝贵的实践技能和战略思维,将理论与实践相结合,在激烈的竞争中打造先进的智能机器人。
一、竞赛主题
学思结合,知行合一,立足培养,重在参与
二、竞赛项目
1、“质量杯”机器人比赛
2、“质量杯”先进成图技术与产品信息建模大赛
三、比赛安排
3.1参赛对象
面向全校,以2017、2018、2019级本科生为主
3.2阶段安排
3.2.1报名阶段
时间:2019年9月25日-10月25日
方式:参赛队填写报名表,按班级统一将报名表交至组委会(实训楼A6-9),并在网上提交电子报名表至邮箱(843754328@qq.com),电子文件命名为“机器人/机构设计-年级班级-队长姓名”(其中每班限报三个队,如有需求可以申请增加队伍数量)。
3.2.2培训与答疑阶段
时间: 2019年10月11日-2019年10月30日
方式:力创团队负责比赛的技术指导及培训,并根据参赛队伍进展情况提供练习场地。
3.2.3比赛阶段
比赛分为预赛与决赛,在一天内全部比赛完成。
时间: 2019年11月7日-11月9日(暂定)
地点:大学生活动中心(暂定)
3.3奖励设置
比赛按成绩5%, 15%,25%设立一、二、三等奖若干,并颁发证书和奖品。
四、比赛规则
4.1“质量杯”机器人比赛
本比赛分为“红外迷宫循迹智能车”,“电磁循迹智能车”,“物料搬运机器人”三类比赛,均采用竞速标准评判成绩。 “物料搬运机器人”适用于2017级参加,“电磁循迹智能车”适用于2018级参加, “红外迷宫循迹智能车” 适用于2019级,可适当调整。
1.器材规定
(1) 微控制器
红外循迹组,组委会提供stc公司的stc89c52rc单片机;电磁循迹组,组委会提供stc公司的stc15系列单片机。物料搬运组,组委会提供法意半导体公司的stm32系列单片机。
(2) 传感器
红外循迹组和电磁循迹组分别使用组委会提供的红外、电磁传感器。也可自行设计,制作红外、电磁传感器。
为保证竞赛的公平性,参赛队伍必须采用组委会提供的车模、电池等器材,但对元器件数量不作要求;硬件可选择统一推荐的串口工具,也可以另行选择;开发软件推荐Keil调试软件,但也可以另行选择。
在组别允许的情况下可使用超声波传感器、干簧管等传感器进行赛道辅助检测。
注:领取材料时必须登记,且比赛完成后需将所有材料如数归还。
2.赛道基本参数
(1)红外循迹智能车比赛
赛道路面用瓦楞纸制作,赛道宽度21.5cm,赛道全大小为159x252,表面为棕黄色。赛道高度为7cm,超声波高板为18cm,共设有2个超声波高板。赛道设有一个起点一个终点,起点终点为一个30x30的区域。以车头穿过记录线为计时起点和计时终点。记录线为一条10cm的黑色胶带。
赛道设有一个长为1m的出发区,计时起始点两边分别有一个长度10cm黑色计时起始线,赛车前端通过起始线作为比赛计时开始或者结束时刻。
(2)电磁循迹智能车比赛
赛道中心铺设有直径为 0.1-1.0mm 的漆包线,其中通有 20kHz,100mA 的交变电流,作为引导信号的交变磁场引导线,频率范围 20k±1kHz, 电流范围 100±20mA。,选手需使用磁场传感器检测赛道磁场。
该类别的赛道参数与红外循迹赛道相同,赛道路面用专用白色KT板制作,赛道宽度30cm,跑道表面为白色,中心有黑线作为引导线,黑线宽(20±5) mm。引导黑线为连续黑线,采用了直线、圆角、直角、交叉、连续S弯等类型元素。跑道最小曲率半径不小于30cm,跑道可以交叉,交叉角为90°。
(3)物料搬运机器人组
各参赛队利用比赛方提供的材料搭建小车,并自主编写程序实现小车功能。如需额外更换物资,在经过比赛方允许后可自行更换。
参赛队因实现如下功能(未全部实现也可参赛,获得相应分数):
1. 完成部分赛道小车自主循迹,特殊赛道处应满足规则要求;
2. 完成取物结构制作,并能够实现取物和放物;
3. 能通过比赛方提供的遥控器完成部分赛道手动控制;
3.比赛要求
本比赛为二阶段比赛,分为预赛和决赛(取预赛成绩的前20%)。参赛队根据抽签决定比赛顺序,决赛时按预赛成绩倒序顺序比赛。
比赛以完整跑完全程的竞速作为主要评比标准。
(1)红外循迹智能车竞速比赛
①参赛队每队有八分钟比赛时间,发车次数无限,可带电脑现场调试烧录程序,跑完全部迷宫计为发车成功。比赛中,不允许破坏赛道,否则算作一次发车失败,并需要消耗队伍的比赛时间修理赛道;
②赛道中设有高板,赛车准确识别并进入下一级赛道,获得加分奖励,避障成功同时也相当于减少剩余赛道长度。
(2)电磁循迹智能车竞速比赛
①上场后五分钟比赛时间(五分钟为准备调试时间+比赛时间)每次发车后的成绩将会替代上一次的发车成绩,发车未成功的成绩记作301秒,完整跑完全部黑线所包含的元素计为发车成功。比赛中,可无数次发车,但正式准备发车必须举手示意裁判才会纪录成绩,否则算作调试;若中途出现冲出赛道、串道等状况,算作一次发车失败。
②比赛有终点停车要求,在终点线后有停车区域,车模精确停止在停车区和成功在终点线后停车分别获得不同的加分奖励,若终点没有停车,则停车分没有,但计为发车成功。
③赛车冲出赛道视为比赛失败,该项成绩记为301秒。
(3)物料搬运机器人组
①参赛队每队有三次发车机会,可带电脑现场调试烧录程序,完成部分赛道小车自主循迹,特殊赛道处应满足规则要求;完成取物结构制作,并能够实现取物和放物;能通过比赛方提供的遥控器完成部分赛道手动控制;
②赛道中根据夹取物料个数和完成任务数得到相应加分,获得加分奖励。
4.评分标准
表1电磁循迹智能车评分标准
|
项目 |
评分 |
说明 |
基础评分 |
速度 |
50分 |
第1名为50分,第2名~第5名每名隔5分,后面每名隔3分(最低得分为0分) |
外观 |
15分 |
器件摆放合理、美观:5分 布线整齐:5分 拥有车外壳:5分 |
技术报告 |
10分 |
技术报告完整,准确。 |
循迹 |
20分 |
完成整个循迹赛道,计满20分,若未完成整个循迹赛道,则每完成一个元素计5分 |
干簧管停车 |
10分 |
在终点停车成功计10分 |
附加评分 |
停车 |
5分 |
停车区内停车为5分,否则该项0分 |
数码管计时 |
20分 |
小车经过起跑线开始计时,过终点线停止计时。数码管与实际时间每相差1秒减5分,减完为止。(数码管显示时间只需精确到秒),不符合要求的为0分 |
表2光电循迹智能车评分标准
|
项目 |
评分 |
说明 |
基础评分 |
速度 |
35分 |
第1名为35分,第2名~第5名每名隔2分,后面每名隔1分(最低得分为0分)。 |
稳定性 |
35分 |
完整跑完赛道的满分,期间小车每触碰一次迷宫(包括高板),扣一分(最低得分为零分),冲坏赛道者判为当次发车失败。 |
外观 |
15分 |
器件摆放合理、美观:5分 布线整齐:5分 拥有车外壳:5分 |
技术报告 |
5分 |
技术报告完整,准确。 |
视频 |
20分 |
每组需要给自己的小车拍摄视频或者制作视频,视频内容需要和自己小车制作相关,评分标准:观赏性、创意性。 |
附加评分 |
超声波 避障选路 |
10分 |
需要在技术报告中有程序说明。 超声波可检测到可以使用:2分;(单次烧录同时检测循迹超声波时) 超声波每完成一次避障跳路:4分;(未完成卡住时可以使用手将其扶正赛道,每次扶正将增加十秒时长) |
表3物料搬运机器人评分标准
|
项目 |
评分 |
说明 |
基础评分 |
循迹 |
20分 |
能完成相应赛道循迹得20分,未能全部完成得相应元素的分数 |
速度 |
20分 |
第一名得满分,后续依次递减1分,至0为止 |
取物 |
10分 |
能拾取物体得10分,中途掉落扣5分,未全部掉落不扣分 |
放物 |
10分 |
能将物体放到指定地点得满分,能放但不能放到指定地点得5分 |
附加评分 |
外观(含LOGO设计) |
15分 |
多名裁判打分,第一名得15分,后续依次递减1分,至5为止 |
遥控操作 |
10分 |
多名裁判打分,第一名得15分,后续依次递减1分,至5为止 |
设计报告 |
15分 |
多名裁判打分,第一名得15分,后续依次递减1分,至5为止 |
注:具体比赛规则和组别要求可能会根据需要适度调整并且发布
4.2“质量杯”机构设计建模比赛
本比赛分为 “三维建模”和“构型设计”两类。其中, “三维建模”适用于2017和2018级学生,“构型设计” 适用于2019级学生。
1.三维建模大赛
比赛背景
为适应信息处理技术的发展,普及先进的成图技术,推广、掌握先进的设计方法,夯实正确的产品设计基础,并对“高教杯”全国大学生先进成图技术与产品信息建模创新大赛进行初步的了解,让大二和大三的同学对于比赛三维建模组比赛题目的难度有一个初步的感受,同时对于自己对软件的学习程度有一个切实的认真和了解,以便更有针对性的去准备比赛,同时也能够对于参加比赛能够有更高的积极性。
比赛内容
零件的三维建模、部分零件的设计以及装配并导出工程图和爆炸图。(180分钟)
比赛要求
a、比赛阶段需自行完成比赛所有操作,不得依靠其他参赛队员或其他人员。
b、可用标准件库和迈迪工具集。
(4)绘图软件:
建模三维软件不限,solidworks(2012、2014、2015、2016)、proe(4.0、5.0)、ug等均可。建模文件格式不限,爆炸图为JPG格式。
(4)比赛过程安排
a 比赛阶段:参赛队员统一在指定教室以考试的方式完成试题,按照绘图的完整度和完成情况来进行评比
b奖项设置:依据成绩排名评选出一、二、三等奖。
2.构型设计比赛
比赛背景
为适应信息处理技术的发展,普及先进成图技术,推广、掌握先进的设计方法,夯实正确的产品设计基础,并对“高教杯”大学生先进成图技术与产品信息建模创新大赛进行初步的了解,让同学对绘图有个基本的认识和感知,考察同学们的空间想象能力,并为以后参加“高教杯”打下基础。
(2)比赛方式
本比赛采用现场绘图的方式进行,参赛队员在指定教室统一参加60分钟绘图,按成绩评比。比赛内容包括:
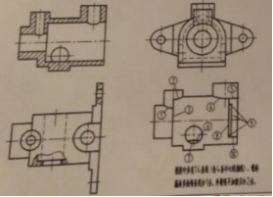
a给出主视图、俯视图和左视图其中两个,选出符合条件的第三个视图。(多选题)
b给出主视图、俯视图和左视图其中两个,画出第三个视图的多种情况。
c给出主视图,俯视图,左视图的剖视图,画出主视图的外形。
注:具体比赛题目可参阅图例。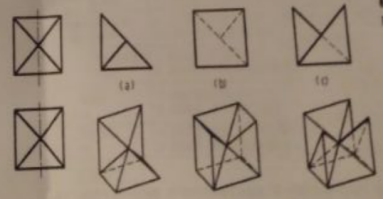
17、18级基础评分标准
|
项目 |
评分 |
说明 |
评 分 项 目 |
零件图 |
40分 |
按照说明书的格式,要求计算完整,进行尺寸综合和运动分析,根据完整程度和机构的创新性进行评分。 |
装配体模型 |
30分 |
要求建模完整,进行正确的装配。 |
工程图 |
15分 |
要求有完整的视图表达,和材料明细表还有必要的标注。 |
爆炸动画 |
15分 |
按照装配的顺序进行爆炸,根据爆炸的合理程度,酌情给分。 |
19级成绩评定由比赛裁判组进行评定。
五、组队说明
1、 在“质量杯”机器人比赛比赛项目中,每个班最多允许3支队伍参加,每队设队长1名。
2、 对于跨班级组队,需要确定所代表的班级及队长;机械学院之外的参赛选手,对于参加的比赛类型可以适当调整。
3、 在队伍名字的选取时,要求表现出队伍的精神风貌。
注:最终解释权归力创团队所有。
附件一:
第六届“质量杯”机器人创新大赛报名表
 队伍名称: 队伍名称:
|
Ø 报名组别 □ 17物料搬运机器人赛□ 18电磁循迹赛□19红外循迹赛 |
Ø 报名组别 □ 17三维建模□ 18三维建模□19构型设计 |
Ø 队长信息 |
队长姓名 |
|
班级 |
|
学号 |
|
联系电话 |
|
Ø 队员一 |
姓名 |
|
班级 |
|
学号 |
|
联系电话 |
|
Ø 队员二 |
姓名 |
|
班级 |
|
学号 |
|
联系电话 |
|
Ø 上报班级: |
注:注:1.报名机器人比赛的参赛队18、19级应提交45元报名费,17级应提交60元报名费。
2.报名17,18,19级机械构型的参赛队应该提交36元报名费。
3.纸质档报名交至实训楼A6-9力创实验室。
4.本比赛面向湖北工业大学所有学生,欢迎其他学院的同学组队参赛。
5.第六届“质量杯”官方qq群:293371459,相关比赛消息和材料的发放会在群内通知,请留意群消息。